首页
关于我们
产品展示
产品推荐分类
米兰(中国)
留置针贴设备系列
水胶体设备系列
创口贴设备系列
水凝胶/巴布剂贴设备系列
医用胶带设备系列
四边封包装设备系列
联动装盒机系列
非标定制设备系列
查看更多 >>
热销产品
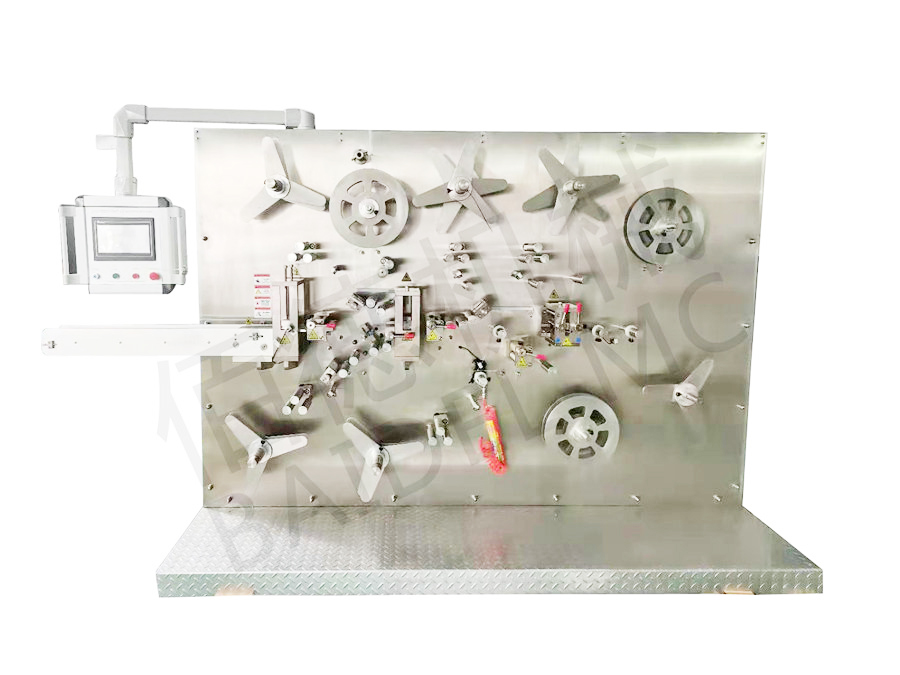
辊封式敷料贴切片包装机
模封式敷料贴切片包装机
米兰web版界面入口
米兰web版界面入口
高速创口贴机
水胶体整套设备
全自动四边封包装机
水凝胶涂布机
新闻资讯
留言反馈
米兰(中国)
English
网站公告:
米兰web版界面入口
全国服务热线:
0577-89991591
产品展示
products
查看更多 >>
产品类别
Product category
米兰(中国)
留置针贴设备系列
水胶体设备系列
创口贴设备系列
水凝胶/巴布剂贴设备系列
医用胶带设备系列
四边封包装设备系列
联动装盒机系列
非标定制设备系列
更多分类
辊封式敷料贴切片包装机
模封式敷料贴切片包装机
米兰web版界面入口
米兰web版界面入口
高速创口贴机
水胶体整套设备
新闻资讯
news
查看更多 >>
2021-03-23
佰德机械-生产车间.
2021-03-23
2台敷料贴切片包装机出口伊朗.
2021-03-23
2台高速创口贴40尺高柜出口伊朗.
新品推荐
New Products
辊封式敷料贴切片包装机
模封式敷料贴切片包装机
米兰web版界面入口
米兰web版界面入口
关于我们
about us
米兰web版界面入口是一家集研发、设计、制造、销售、服务于一体的现代科技型企业。主要生产医用敷料贴切片包装机、高速创口贴机、医用水胶体生产线、水凝胶/巴布贴涂布生产线、四边封包装机、PE打孔设备、分切机复卷机及非标定制设备。
查看更多 >>
行业知识
Safety Tips
查看更多 >>
米兰(中国)
contact us
手机:
13587438287
电话:
0577-89991591
邮箱:
shianxie@126.com
地址:
温州市瓯海区娄桥街道繁瑞路8号
查看更多 >>
JN江南·(中国)集团
|
开云手机入口官网
|
赢博平台
|
乐动在线
|
半岛web版登录入口
|
江南官方注册
|
乐投
|
星空在线登录
|
江南在线手机版(大中国区)
|